
Способ вращения
Как известно; при вращении некоторой точки вокруг оси она движется в плоскости, перпендикулярной оси вращения, и описывает окружность. Для применения способа вращения в целях преобразования чертежа отметим следующие четыре элемента (рис. 5.8):
ось вращения (MN);
плоскость вращения точки (пл. S перпендикулярна (MN));
центр вращения;
радиус вращения (R; R = |ОА|).
В качестве оси вращения обычно используют прямые, перпендикулярные или параллельные плоскостям проекций. Рассмотрим вращение относительно осей, перпендикулярных плоскостям проекций.
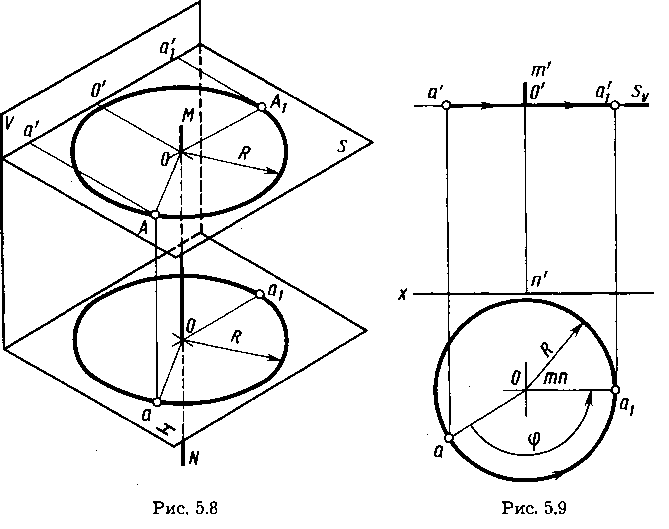
Вращение точки А на чертеже относительно оси MN, перпендикулярной плоскости Н, показано на рисунке 5.9. Плоскость вращения S параллельна плоскости H и на фронтальной проекции изображена следом Sv. Горизонтальная проекция о центра вращения О совпадает с проекцией тп оси, а горизонтальная проекция оа радиуса вращений ОА является его натуральной величиной. Поворот точки А на рисунке 5.9 произведен на угол ф против часовой стрелки так, чтобы в новом положении точки с проекциями а1', а1 радиус вращения был параллелен плоскости V При вращении точки вокруг вертикальной оси ее горизонтальная проекция перемещается по окружности, а фронтальная проекция — параллельно оси х перпендикулярно оси вращения.
Если точку вращать вокруг оси, перпендикулярной плоскости V, то ее фронтальная проекция будет перемещаться по окружности, а горизонтальная — параллельно оси х.
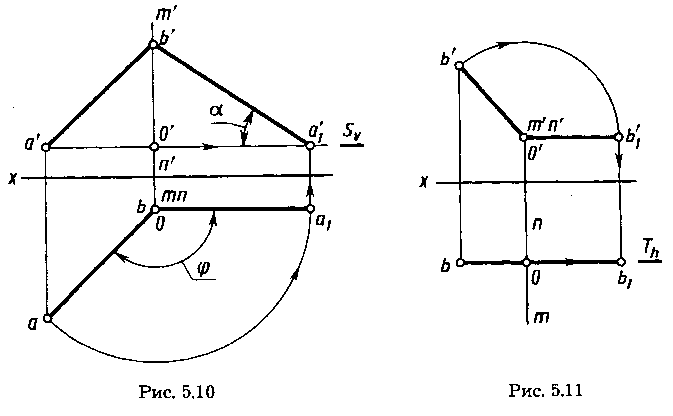
Вращение точки вокруг проецирующей прямой применяют при решении некоторых задач, например при определении натуральной величины отрезка прямой. Для этого (рис. 5.10) достаточно ось вращения с проекциями т'п', тп выбрать так, чтобы она проходила через одну из крайних точек отрезка, например точку с проекциями b', b. Тогда при повороте точки А на угол ф в положение А1 (ОА1 || пл. V, оа, || оси х) отрезок АВ перемещается в положение А1В, параллельное плоскости V и, следовательно, проецируется на нее в натуральную величину. Одновременно в натуральную величину будет проецироваться угол а наклона отрезка АВ к плоскости Н.
Поворот (вращение) точки с проекциями b', b относительно оси с проекциями т'п', тп, перпендикулярной плоскости V, показан на рисунке 5.11. При вращении точка В перемещена в плоскости вращения Т (Th) в положение с проекциями b1', b1 так, что радиус вращения ОВ стал параллелен плоскости Н (о'b' || оси х).
Применение способа вращения без указания на чертеже осей вращения, перпендикулярных к плоскостям проекций. Если вращать геометрическую фигуру вокруг оси, перпендикулярной к плоскости проекций, то проекция на этой плоскости не изменяется ни по виду, ни по величине (меняется лишь положение проекции относительно оси проекций). Проекции точек геометрической фигуры на плоскости, параллельной оси вращения, перемещаются по прямым, параллельным оси проекции (за исключением проекций точек, расположенных на оси вращения), и проекция в целом изменяется по форме и величине. Поэтому можно применять способ вращения, не задаваясь изображением оси вращения. В этом
случае, не изменяя величины и формы одной из проекций геометрического образа, перемещают эту проекцию в требуемое положение, а затем строят другую проекцию так, как указано выше.
На рисунке 5.12 показано применение способа вращения без указания осей для определения натуральной величины треугольника ABC, заданного проекциями а'b'с', abc. Для этого выполнено два поворота плоскости общего положения, в которой расположен треугольник так, чтобы после первого поворота эта плоскость стала перпендикулярной плоскости V, а после второго — параллельна плоскости H. Первый поворот вокруг оси, перпендикулярной плоскости H, без указания ее положения осуществлен с помощью горизонтали с проекциями с'1', с—1 в плоскости треугольника. При этом горизонтальная проекция aьc повернута так, чтобы она совпала с направлением проецирования. Горизонтальная проекция треугольника сохраняет свой вид и величину, изменяется лишь ее положение. Точки А, В и С при таком повороте перемещаются в плоскостях, параллельных плоскости H. Проекции а1', с1, b1' находятся на горизонтальных линиях связи а'а1', b'b1' и с'с1'. Фронтальной проекцией треугольника в новом положении является отрезок а1'b1'c1'.
Второй поворот, приводящий треугольник в положение, параллельное плоскости H, производим вокруг оси вращения, перпендикулярной плоскости H (положение оси также не указано). Фронтальная проекция при втором повороте сохраняет вид и величину, полученные после первого поворота. Точки А1, D1 и С1 перемещаются в плоскостях, параллельных плоскости V Проекции а2, b2, с2 находятся на горизонтальных линиях связи а,а2, blb2, с1с2. Проекция а2b2с2 представляет собой натуральную величину данного треугольника.
При выполнении рассмотренных поворотов вокруг осей, перпендикулярных плоскостям проекций, эти оси не указаны, но их можно легко найти. Например, если провести отрезки аа1, b1b2 и через их середины провести перпендикуляры, то полученная точка пересечения этих перпендикуляров и будет горизонтальной проекцией оси вращения, перпендикулярной к плоскости H.
Применение способа вращения без указания осей несколько упрощает построения, не происходит наложения одной про
екции на другую, но чертеж занимает большую площадь. (Рассмотренный случай вращения без изображения осей вращения является частным случаем способа плоскопараллельного перемещения.)
Способ вращения вокруг прямых, параллельных плоскостям проекций. Натуральную величину плоской фигуры можно определить вращением вокруг оси, параллельной плоскости проекций, одним поворотом приведя фигуру в положение, параллельное плоскости проекций.
На рисунке 5.13 показано определение величины треугольника с проекциями a'b'c', abc вращением вокруг горизонтали. При этом все точки треугольника (за исключением лежащих на оси вращения) вращаются вокруг оси по окружностям в плоскостях, перпендикулярных к оси. Если треугольник займет положение, параллельное плоскости проекций, радиусы вращения его точек окажутся параллельными этой плоскости, т. е. будут проецироваться на плоскость Н в натуральную величину.
В качестве оси вращения взята горизонталь с проекциями с'1', с-1.
Точка С на оси вращения остается неподвижной. Для изображения горизонтальной проекции треугольника после поворота надо найти положение проекций двух других его вершин. Вершины с проекциями а', а и b', b треугольника перемеща-
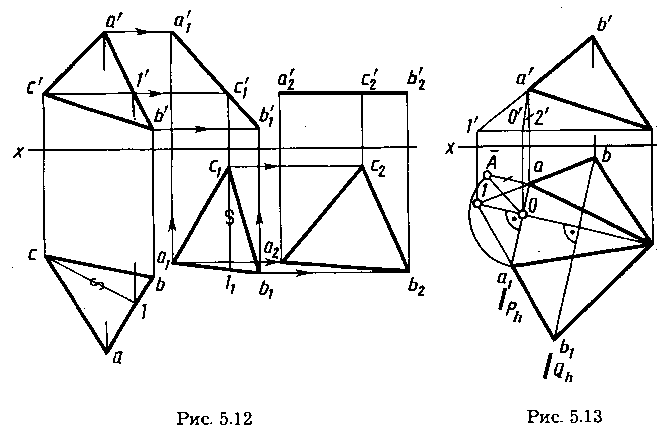
ются в плоскостях Р и Q движения этих точек. Горизонтальной проекцией о центра вращения вершины А является точка пересечения горизонтальной проекции с—1 оси вращения с горизонтальной проекцией Ph. По ней отмечена его фронтальная проекция о'. Отрезки оа — горизонтальная, о'а' — фронтальная проекция радиуса вращения точки А. Натуральная величина оА радиуса вращения точки А определена способом, рассмотренным в 2.3 (см. рис. 2.9), т. е. построением прямоугольного треугольника. По катетам оа и аА = о'2' построен треугольник оаА, его гипотенуза равна радиусу вращения точки А.
От проекции о центра вращения точки А по направлению следа Ph плоскости ее движения откладываем натуральную величину радиуса вращения. Отмечаем горизонтальную проекцию а, точки А, повернутой до положения треугольника, параллельного плоскости Н. Горизонтальную проекцию bt точки В в повернутом положении находим как точку пересечения горизонтальной проекции 1—аt со следом Qh. Горизонтальная проекция a1cb1 выражает натуральную величину A AьC, так как после поворота плоскость треугольника параллельна плоскости Н. Фронтальная проекция повернутого треугольника совпадает с фронтальной проекцией горизонтали 1'с', т. е. представляет собой отрезок прямой линии.
Если требуется повернуть плоский геометрический образ до положения, параллельного плоскости V, то за ось вращения выбирают фронталь.
Поворот плоскости вокруг ее следа до совмещения с соответствующей плоскостью проекций (этот случай называют также способом совмещения). Если плоскость вращать вокруг ее следа до совмещения с плоскостью проекций, в которой расположен этот след, то геометрические образы, расположенные в плоскости, изобразятся без искажения. Этот способ является частным случаем вращения вокруг горизонтали или фронтали, так как горизонтальный след плоскости можно рассматривать как «нулевую» горизонталь горизонтальной плоскости, а фронтальный след — как «нулевую» фронталь.
На рисунке 5.14 показано наглядное изображение поворота плоскости общего положения Р вокруг горизонтального следа Ph в направлении от плоскости V к зрителю до совмещения с плоскостью Н. В положении совмещения плоскости Р с плоскостью
H прямая PUq представляет собой след Ри, совмещенный с плоскостью Н. След Ph как ось вращения не меняет своего положения. Точка Рx пересечения следов также не меняет своего положения. Для построения совмещенного положения PL,a следа Pv достаточно найти еще одну точку, например точку N, этого следа (кроме точки Рх) в положении, совмещенном с плоскостью Н.
Точка N опишет дугу в плоскости Q, перпендикулярной к оси вращения. Центр О этой дуги является точкой пересечения плоскости Q со следом Ph. Точка N0 на плоскости Н является точкой пересечения дуги радиуса ON в плоскости Q со следом Qh. Проведя через Рх и N0 прямую, получим PU0. Отрезок PXN не изменяет своей длины при вращении плоскости; поэтому точку N0 можно получить при пересечении Qh с дугой, описанной в плоскости Н, из точки Рх радиусом PXN.
Для выполнения рассмотренных построений на чертеже (рис. 5.15) на следе Ри выбрана произвольная точка N (она совпадает со своей проекцией п'). Через ее горизонтальную проекцию п проведена прямая по, перпендикулярная к оси вращения — следу Ph. На этой прямой найдена точка N0, т. е. точка N после совмещения с плоскостью Н. Она найдена на расстоянии PXN0 = Рхп' от точки Рх или на расстоянии oN0 от точки о, равном радиусу вращения точки N. Длина радиуса oN0 = oN определена, например, как гипотенуза прямоугольного треугольника с катетами on и nN (nN=nn'). Прямая PU0, проходящая через точки Рх и N0, — совмещенное положение следа Ри.
Аналогично построено совмещенное положение С0 точки С. Радиус вращения оС найден как гипотенуза прямоугольного
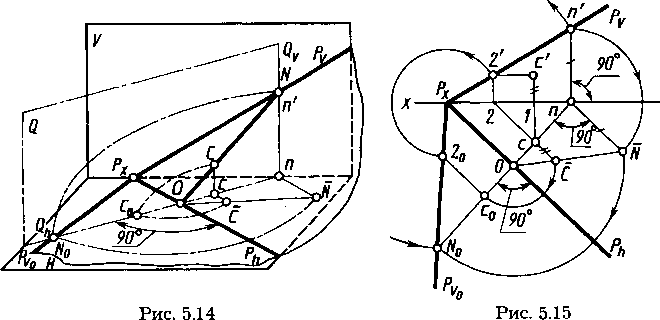
треугольника, у которого один катет ос, другой катет сС=с'1. Второй вариант построения выполнен с помощью горизонтали плоскости Р с проекциями с'2', с —2. С помощью дуги радиуса Рх2' найдено совмещенное положение 2о точки 2 на линии Рv0, а в совмещенном положении 20С0 горизонталь проведена через точку 20 параллельно следу Ph.
Если требуется совместить плоскость с фронтальной плоскостью проекций, то вращать плоскость следует вокруг ее фронтального следа.